|
3 算例
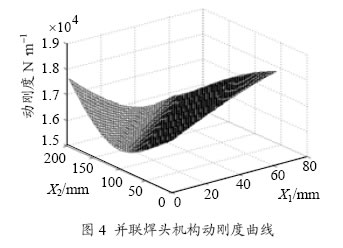
取杆件的直经为5mm,长度为160mm,左边为两根杆件,右边为一根杆件,杆件材料为45号钢,则1k = 49.06 kN mm,2k =24.53kN mm。利用Matlab软件,计算出机构在整个工作区间的动刚度特性曲线如图4所示。
4 结论
(1) IC芯片粘片机焊头机构的动刚度与位置有关,动刚度特性曲线呈现出两边大,中间小的形状。这对整个机构的工作是有利的,因为在左右两边是拾片和焊片工况,需要机构的刚度大,这样运动精度和定位精度可以相应地提高,而在中间,则是送片工况,对运动精度和定位精度的要求没有拾片和焊片工况高。
(2) 在整个工作区域,机构的动刚度都很大,没有奇异点,因此,将该机构应用于高速高精度的IC芯片粘片机的焊头机构是可行的。即使在高速运动时,该机构也能满足工作要求,不会产生共振现象。
参考文献:
[1] 李克天,陈新,吴小洪,等。粘片机引线框的空间凸轮供送机构设计[J]。中国机械工程,2005,(1):54~56。
[2] 汪劲松,黄田。并联机床――机床行业面临的机遇与挑战[J]。中国机械工程,1999,10(10):1103~1107。
[3] Selfridge R G,Mattew G K.Forward analysis of somespecial stewart platform[J].Journal of Robotic Systems,2000,10(17):517~526.
[4] Tsai L W.Solving the inverse dynamics of stewart-gouhmanipulator by the principle of virtual work[J].Journal ofMechanical Design,2000,(122):3~9.
[5] 彭卫东,陈新,李克天。悬置式3自由度并联机构的位置及转动性能分析[J]。机械设计,2005,(4):12~13。
[6] 李兵,王知行,李建生。基于凯恩方程的新型并联机床动力学研究[J]。机械科学与技术,1999,(1):41~43。
[7] 王世军,黄玉美,赵金娟。机床导轨结合部的有限元模型[J]。中国机械工程,2004,18(9):1634~1636。
[8] 敖银辉,陈新,温兆麟。平面并联机构刚度与动力学指标分析[J]。中国机械工程,2004,18(9):1607~1609。
|
